
Sidebar
Table of Contents
Bit:Bot Robot BBC Micro:Bit-hez

Bevezetés
A BBC micro:bit tökéletes módja annak, hogy fiatalokat és időseket egyaránt bevonja a robotika, és a programozás rejtelmeibe. A micro:bit rádió- és Bluetooth kapcsolattal rendelkezik, így lehetőségünk van telefonnal, vagy egy másik micro:bit-tel vezérelni azt.
Jellemzői
- 2 fém hajtómű motor. Mindkettő teljes mértékben vezérelhető szoftveresen, mind a sebessége, mind az iránya változtatható.
- Gumikerekekkel van ellátva a maximális tapadás érdekében
- 12 mini neopixel (vezérelhető ledek), 2×6-os elrendezésbe. Minden pixelt külön lehet vezérelni, színt állítani, fényerősséget… stb
- 2 vonalkövető szenzorra rendelkezik.
- 2 analóg fényérzékelővel rendelkezik, így például arra is beprogramozható, hogy kövesse a fényt, vagy épp kerülje azt.
- Rendelkezik egy apró hangszóróval, így képes hangjelzést kiadni.
- 3xAA elemtartó, be/ki kapcsolóval, és hozzá tartozó visszajelző lámpával.
- BBC micro:bit csatlakozó felület.
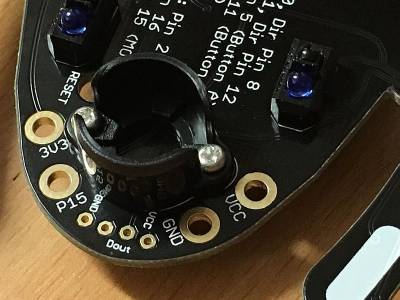
- További csatlakozás található a Bit:bot elején, ahová különböző érzékelőket lehet csatlakoztatni. (pl Ultrahangos távolságérzékelő)
Összeszerelés
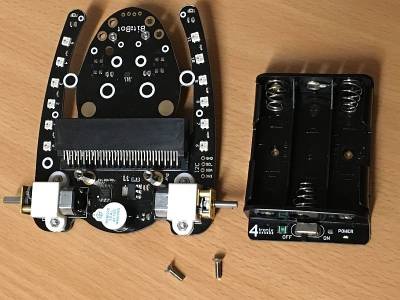
0. lépés – Ellenőrizze, hogy minden alkatrész meg van-e:
- 1 görgős szerkezet (ez szolgál az első kerék gyanánt)
- 2 x 6 mm-es M2-es csavarok
- 2 x M2 anyacsavar
- 2 x 12 mm távtartó csavar
- 4 x 8 mm-es M2.5 önmetsző csavar
1.Az M2 6 mm-es csavarokkal, és anyákkal rögzítse az első görgős házat, majd pattintsa be a labdát a házba.



2.A M2,5 6mm-es csavarokkal, és a 8 mm-es önmetsző csavarokkal, rögzítse az elemtartót a távtartó csavarokra, úgy hogy a be/ki kapcsoló a Bit:bot hátulján legyen.
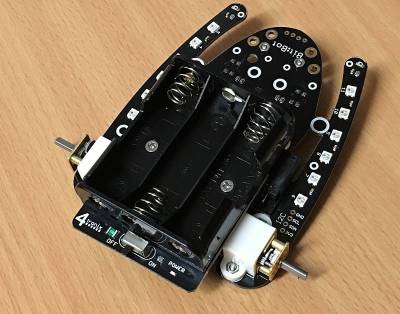
3.Helyezze a kereket a „sima” oldalával kifelé a tengelybe.

4.Helyezze a BBC micro:bit-et a foglalatba úgy, hogy a ledek felfelé nézzenek.
Ismerd meg a saját Bit:bot-od
Felül nézet:
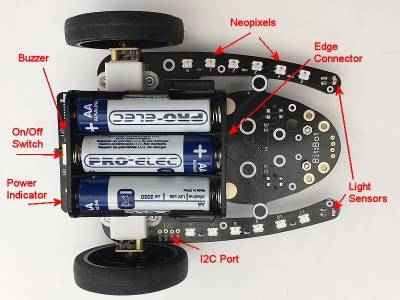
- Buzzer: csipogó
- On/Off switch: Be/Ki kapcsoló
- Power Indicator: Elem tartó
- I2C Port: I2C csatlakozó
- Light Sensors: Fényszenzor
- Edge Connector: Micro:bit csatlakozó
- Neopixels: Ledek
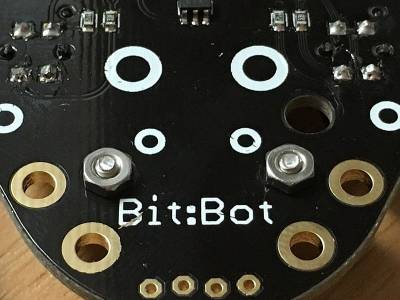
Alul nézet:

- Line Sensors: Vonalérzékelő
- Neopixel Port: Távolság érzékelő foglalatok
- Expansion Connections: Bővítmény csatlakozó
- Micro:Bit Reset: Micro:Bit újraindító gomb
Programozás a Microsoft Makecode programban
Makecode blokkprogramozás esetén a hivatalos BitBot kiterjesztést használhatja. Lépjen a Speciális lapra (vagy nyomja meg a fogaskerék ikonját), majd válassza az Extensions lehetőséget. Ezután keresse meg a BitBotot, és válassza ki a hivatalos csomagot. Ez egy BitBot lapot biztosít az eszköztárban, amely 4 alkategóriát tartalmaz:
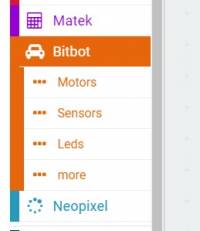
Motorok

- Az első [DRIVE AT 600] mindkét motort 1023 és -1023 között választott sebességgel kapcsolja, ami jelen esetben 600. 1023 teljes sebességgel van előre és -1023 teljes sebességgel hátrafelé.
- A sebesség 0-ra állítása mindkét motort leállítja. A második ugyanaz lesz, de a kiválasztott idő után mindkét motort leállítja.
- A következő [SPIN LEFT AT SPEED 600] a BitBot-ot balra forgatja, a kiválasztott sebességgel és iránnyal egy kereket előre, a másikat pedig a hátra forgatja.
- Az utolsó blokk lehetővé [DRIVE LEFT MOTOR(S) AT SPEED 600] teszi az egyes motorok vezérlését. Vagy a bal vagy a jobb motor (vagy mindkettő)
LED
A Bit: Bot nagyszerű tulajdonsága, hogy neopixel LED-eket tartalmaz, mindegyik karon 6 -6 LED

Általában a LED-ek frissítésének folyamata kétlépcsős folyamat:
- Végezze el a LED-színek változásait (pl. “set all LEDs to Red”)
- Küldje el a LED-ek összes változását (“show LED changes” ) Egyszerű szivárvány mintázatot kaphat a LED-eken mindössze a „beállított szivárvány” blokk segítségével

Egyszerű szivárvány mintázatot kaphat a LED-eken mindössze a [SET LED RAINBOW] blokk segítségével.
Érzékelők
Az érzékelők kategória hozzáférést biztosít mind az integrált funkciókhoz (hangjelző, vonalkövető érzékelők, fényérzékelők), mind az opcionális kiegészítőkhez (ultrahangos távolságérzékelő, Talon grabber)
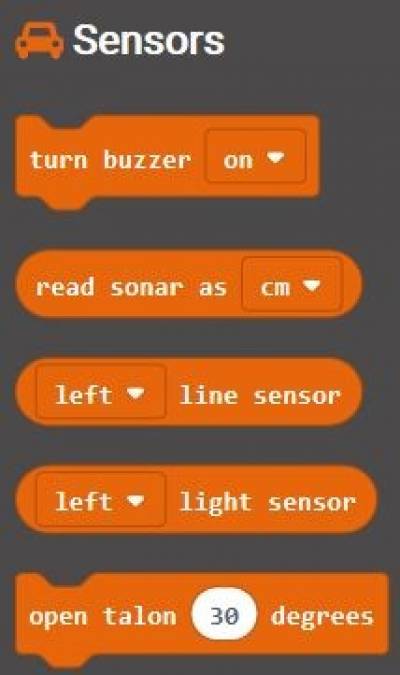
- turn buzzer on/off : csipogó be/ki kapcsolás
- read sonar as cm : ha a szonár “lát” valamit, ez megmondja a távolgását
- left/right line sensor: bal/jobb oldali vonalszenzor
- left/right light sensor: bal/jobb oldali fényérzékelő
Csipogó
A [TURN BUZZER ON/OFF] blokk lehetővé teszi, hogy egyszerű hangjelzést adjon.

Ultrahangos távolságérzékelő (szonár)
A [READ SONAR AS CM] blokk lehetővé teszi, hogy elolvassa a távolságot a Bit:bot elejétől a legközelebbi akadályig. Ne várd el, hogy ez lenyűgözően pontos legyen, de elég jó az akadályok elkerülésére stb. Itt egy nagyon egyszerű akadálykikerülő program.

Ebben a programban a távolság centiméterben olvasható. Ha valami közelebb van mint 20 cm, akkor megfordul, különben egyenesen tovább halad.
Vonalkövető érzékelő
Ezeknek az érzékelőknek az feladata az, hogy egy fekete, nem fényvisszaverő vonalat képes érzékelni egy egyébként fényvisszaverő felületen. Ezután programozhatja a bitet: Bot, hogy kövesse a fekete felületet.
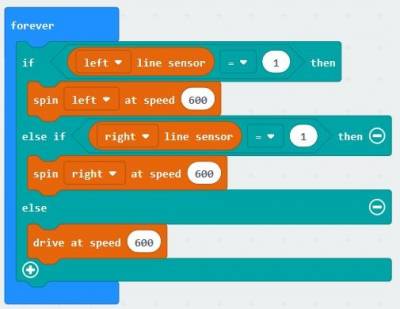
Ez egy nagyon egyszerű, de kevésbé hatékony vonalkövető program. De működik. Ha a bal oldali érzékelő egy vonalat észlel, balra fordul, ha a jobb oldali érzékelő egy vonalat észlel, jobbra fordul.