
Sidebar
Table of Contents
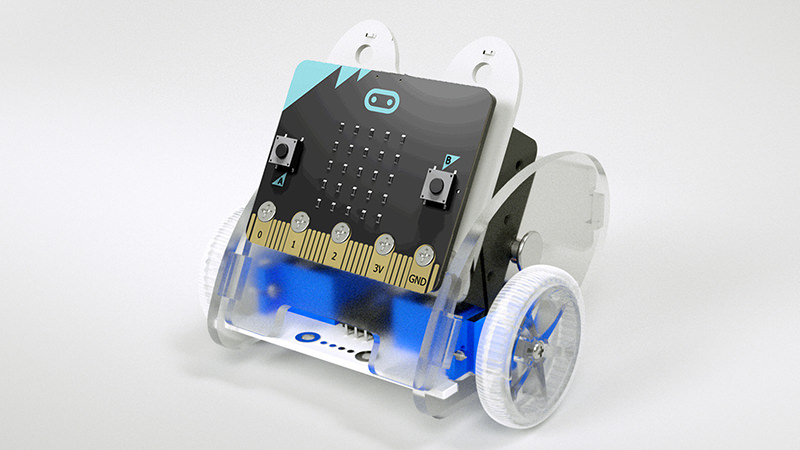
Ring:bit Car V2
Bevezetés
A Ring:bit Car egy intelligens autó, mely a BBC Micro:Bit és az ELECFREAKS közös terméke. A Ring:bit Car a Micro:bit 3 portját használja (0,1,2), hogy a különböző érzékelők, komponensek könnyen csatlakoztathatóak legyenek az eszközhöz. Az autó könnyen programozható, hogy távvezérelhető legyen, vagy épp fényárban ússzon a LED-ek segítségével. Képes még vonal, és fény követésre, ezek mellet megtanítható akadály kikerülésre is.
Összeszerelés

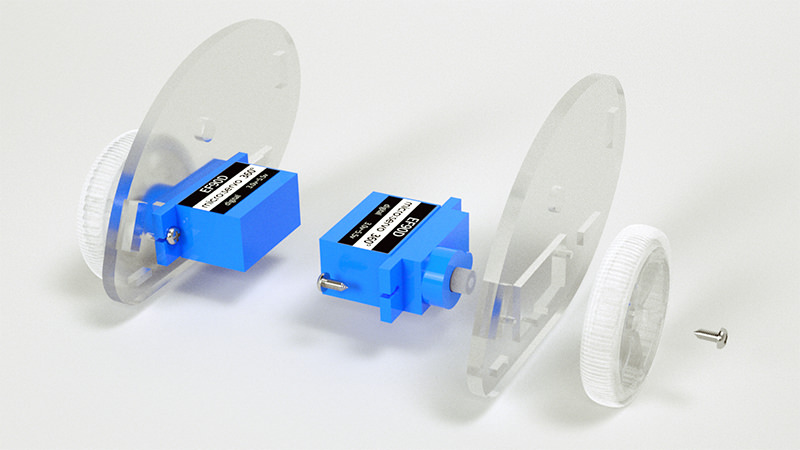
1. Lépés
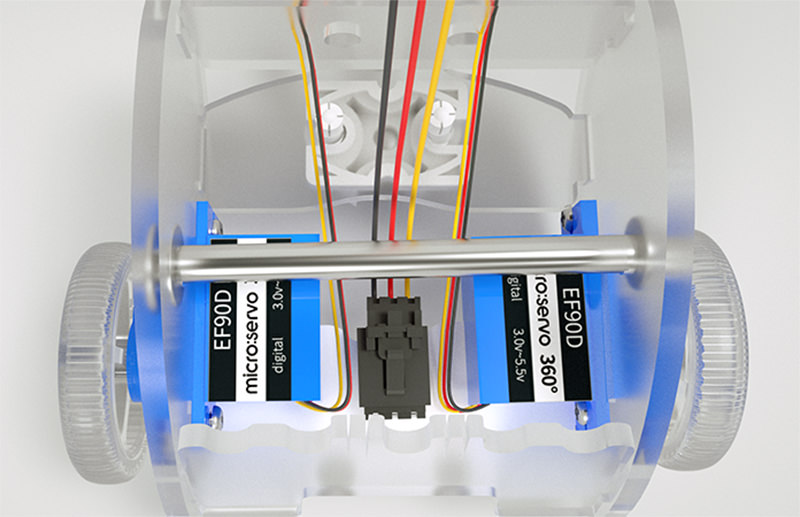
- Először rögzítse csavarokkal a szervót az oldallapokhoz
- Ezután csavarral rögzítse a kereket a szervóhoz
2. Lépés
- A szegecs segítségével rögzítse fel a görgőkeretet az alvázra.

3. Lépés
- Szerelje fel az előlapot, a hátlapot és az alaplapot az oldallapra az alábbi ábra szerint.

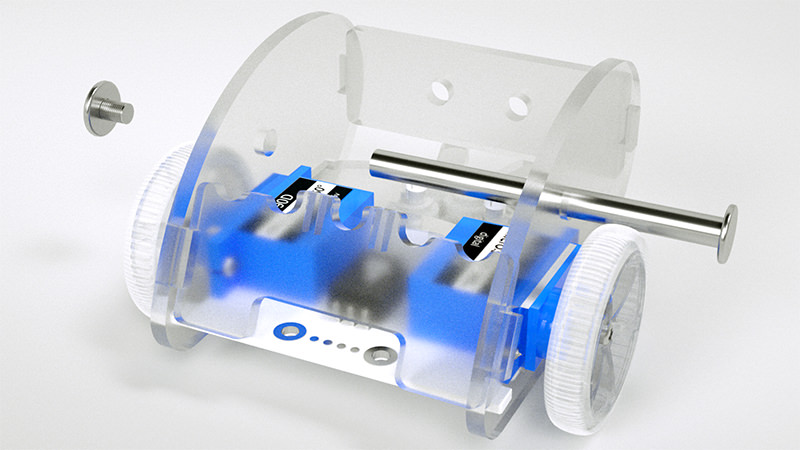
4. Lépés
- Helyezzük a távtartó rudat az oldallapon lévő lyukakba és rögzítsük a csavarral.
5. Lépés
- Csavarokkal rögzísük a Micro:bitet a Ring:bit modulhoz
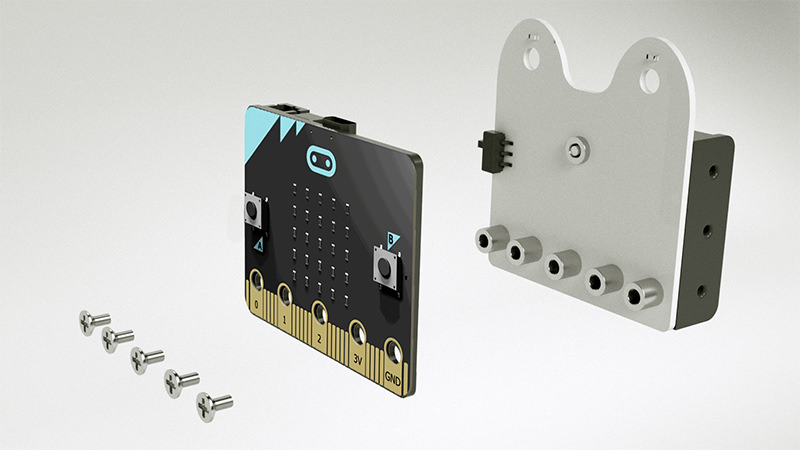
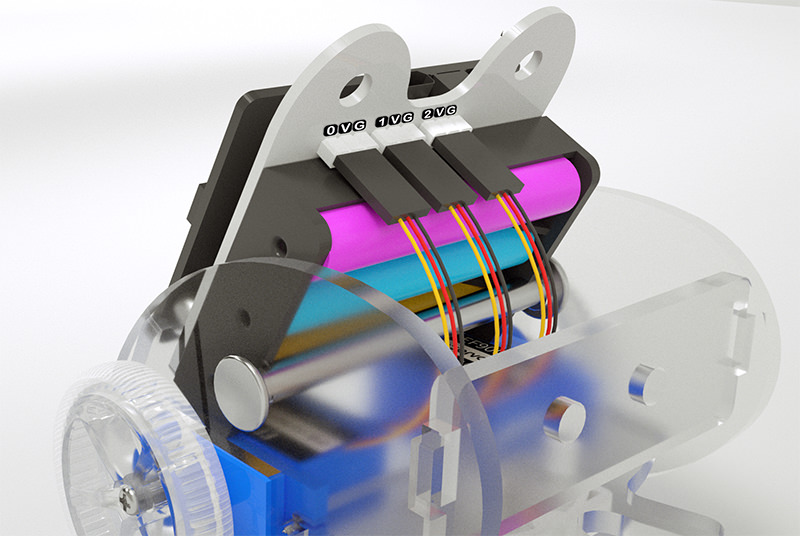
6. Lépés
- Csatlakoztassuk a vezetékeket a megfelelő helyre
Első program, Teljes sebességgel előre, hátra
Ha ezelőtt még sosem programoztál a MakeCode felületen, akkor először olvasd el a ezt.
1. Lépés, Ring:bit Car elemek importálása
- Kattintunk a “Haladó” gombra, majd a “Kiterjesztések”-re.

- Kezdjük el gépelni, hogy “ringbit” majd a megjelenő elemre kattintsunk.

2. Lépés
- Miután hozzáadtuk a bővítményt, az a menüsorban meg is jelenik.

- Ezek után nyissuk meg a menüpontot és válasszuk ki a képen látható blokkot.

 Majd húzzuk az “indításkor” blokkba. Ezzel megadjuk hogy a P1 és P2-es lábak szolgáljanak a szervók mozgatására.
Majd húzzuk az “indításkor” blokkba. Ezzel megadjuk hogy a P1 és P2-es lábak szolgáljanak a szervók mozgatására.
 Ezek után adjuk meg, hogy A gomb megnyomására, menjen teljes sebességgel előre, B gomb megnyomására teljes sebességgel hátra, és A+B gomb egyszerre megnyomásával álljon meg. Ezt az alábbi módon tudjuk kivitelezni.
Ezek után adjuk meg, hogy A gomb megnyomására, menjen teljes sebességgel előre, B gomb megnyomására teljes sebességgel hátra, és A+B gomb egyszerre megnyomásával álljon meg. Ezt az alábbi módon tudjuk kivitelezni.
3. Lépés
- Töltsük le, majd küldjük a programot a Micro:bit-re.

Körkörös mozgás
1. Lépés
- Importáljuk a Ring:bit Car elemeit az előzőekben megismert módon. Amennyiben már importálva van ezt a lépést hagyja ki és lépjen a következőre.
2. Lépés
Adjuk meg, hogy indításkor a P1 és P2-es lábra ossza ki a program szervó irányítását. (Amennyiben nem sikerül, nézze vissza az előzőekben bemutatott példákat)
3. Lépés
 Adjuk meg, hogy A gomb lenyomásakor a bal kerék 100-as sebességgel kezd el forogni előre, míg a jobb kerék csak 50-es sebességgel fog haladni, ebből következik egy körkörös haladási irány.
Adjuk meg, hogy A gomb lenyomásakor a bal kerék 100-as sebességgel kezd el forogni előre, míg a jobb kerék csak 50-es sebességgel fog haladni, ebből következik egy körkörös haladási irány.
Ha pedig a B gombot nyomjuk akkor “Brake” tehát fékezni fog és a kerekek nem forognak tovább.
4. Lépés
- Töltsük fel a projektet a Micro:Bit-re, és teszteljük.